





Do You Need Help? Here Us : هذه : +86 595 22486398
Do You Need Help? Here Us : هذه : +86 595 22486398
صدمة! حفارة كهربائية جديدة تضيف وظيفتين جديدتين
August 30, 2024
تعد الحفارات من أهم الآلات المستخدمة في صناعة التعدين والبناء. واليوم، يوفر الوقود الأحفوري معظم الطاقة التي تحتاجها الحفارات. وبما أن هذا النوع من الطاقة ضار بالبيئة، فإن تطوير وظائف الحفار الكهربائي له أهمية خاصة. تستهلك الحفارات الهيدروليكية، على وجه الخصوص، الكثير من الطاقة حتى عندما لا تتحرك. بالإضافة إلى ذلك، تهدر الخراطيم والصمامات في أنظمة الحفارات الهيدروليكية الطاقة، مما يدفع الباحثين إلى استخدام المحركات الخطية الكهربائية. يتم تشغيل هذه المحركات عادةً بواسطة محرك كهربائي وسلسلة من البراغي الكروية (أو البراغي الرصاصية)، والتي تكون مطلوبة لتحمل الضغوط المحورية الكبيرة أثناء تبديد الطاقة عندما لا تكون في حالة حركة.
يستكشف البحث المستفيض استخدام المحركات الكهربائية في الحفارات. في تصميم وتنفيذ أنظمة القيادة والتحكم الكهربائية لحفارات التعدين، يُقترح نظام ميكاترونيك جديد لحفارات التعدين يستخدم محركات التيار المستمر وأجهزة استشعار طاقة الترانزستور ويهدف إلى تقليل استهلاك الطاقة بنسبة 20% إلى 30%. علاوة على ذلك، من خلال تقليل الحمل الديناميكي على مشغلات الحفار، يهدف الباحثون إلى تقليل الحمل على مشغلات الحفار الكهربائية من خلال دمج جهاز تخميد مرن إضافي في مخطط حركة الحفار.
لقد دفعتنا قدرة المحرك الخلفي المنخفضة للمشغلات الكهربائية إلى تطوير حفارات كهربائية بهذه الميزة. ومع ذلك، تنتج المحركات الكهربائية عادة قوة أقل من المحركات الهيدروليكية. لذلك، يجب تصميم الحفارات التي تستخدم هذه المحركات بشكل مختلف بحيث تتحمل المحركات أحمالًا أخف مع نفس الأحمال الخارجية على طرف الدلو. هذا التصميم يمكن أن يحسن قدرة الحمولة للحفار الكهربائي. وفي الوقت نفسه، فإن تقليل الحمل على المشغل يمكن أن يقلل من استهلاكه للطاقة.
1. تصميم وتصنيع الحفارات الكهربائية
تقترح هذه الدراسة تصميمًا جديدًا للحفار الكهربائي باستخدام مشغل لولبي خطي، مع الاستفادة من قدرته المنخفضة على القيادة العكسية لتوفير الطاقة أثناء فترات الخمول ولديه قدرة تحميل أقل من المحرك الهيدروليكي. على وجه التحديد، يهدف الترتيب المتوازي للمحركات الخطية في التصميم الجديد إلى تقليل توزيع الحمل عبرها (الشكل 1).

الشكل 1. الحفارة المصنعة وجهاز الاختبار
المحركات الثلاثة الأولى المثبتة على الحفار هي مشغلات خطية كهربائية (الشكل 2) لحركات ذراع الرافعة وذراع الرافعة والدلو، في حين أن المحرك الرابع عبارة عن محرك DC دوار مُجهز للتحكم في حركات التأرجح. يتم توصيل محرك DC الدوار في المحرك الخطي الكهربائي بمسمار الرصاص من خلال سلسلة من البكرات والأحزمة. يتم توصيل المحرك أيضًا بمقياس الجهد الدوار، والذي يوفر معلومات حول طول المحرك. بالإضافة إلى ذلك، المحركات الخطية في هذه الحفارة متصلة بالشبكة كمصدر للطاقة.
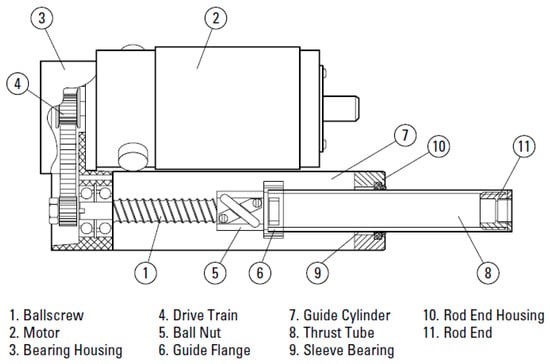
الشكل 2. مكونات المحرك الكهربائي الخطي
تتمتع المحركات الخطية المختارة بقدرة تحميل ديناميكية تبلغ 2000 نيوتن وسرعة حركة تبلغ 20 مم/ثانية. بمساعدة اثنين من نوابض التوتر الضخمة، يمكن رفع وصلة ذراع الرافعة (الشكل 3). القوة القصوى لهذه الينابيع هي 70 كجم. الحفارة’هيكل الجهاز مصنوع من صفائح الألمنيوم ثنائية الأبعاد المقطوعة بالليزر والفولاذ المقاوم للصدأ. الحفارة’ذراع الرافعة وذراع الرافعة مصنوعان من الألومنيوم ويتم تجميعهما باستخدام مسامير M12.
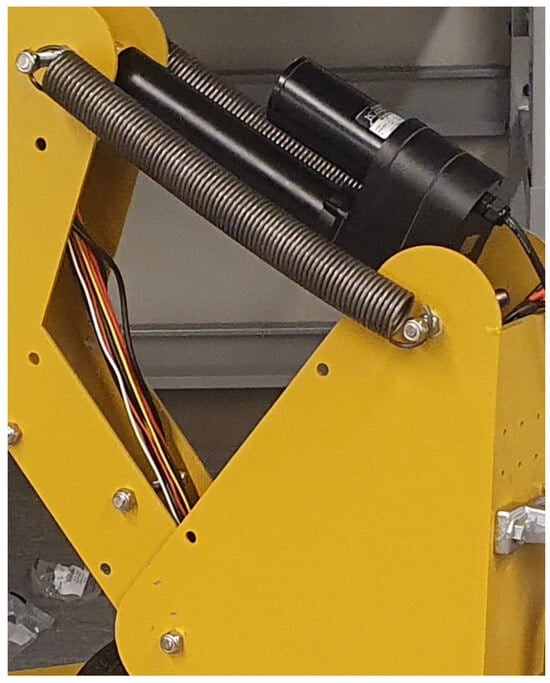
الشكل 3. يساعد زنبركان ضخمان مشغل ذراع الرافعة على رفع يد الروبوت
يتم لحام أربعة أنابيب فولاذية مقطوعة معًا مع الألواح الفولاذية الموجودة بالأسفل لتشكيل الإطار السفلي للحفار (الشكل 4). يحتوي الهيكل على أربع عجلات غير نشطة لتسهيل حركته. يتم بعد ذلك تثبيت مناور الحفار (الشكل 5) على الإطار السفلي باستخدام محملين قويين.

الشكل 4. البنية التحتية للحفارة

الشكل 5. الجزء المناور من الحفار
بالنسبة للاختبار الداخلي، تم وضع الحفار على ارتفاع 85 سم، ثم تم دفعه لإزالة كومة من الرمل من الحاوية الرئيسية ونقلها إلى الحاوية الجانبية. تتميز الحاوية الرئيسية بلوحة أكريليك شفافة تسمح بمقارنة المسار الفعلي وسطح التربة المحفور في كل مرة تقوم فيها بالحفر. تقوم كاميرا العمق، المثبتة على مسافة من الجانب الشفاف للحاوية الرئيسية ومتصلة بالكمبيوتر، بمراقبة شكل الرمال في الحاوية. استخدم برنامج MATLAB R2021a لمعالجة بيانات المستشعر من الكاميرا. الخطوة الأولى في مرحلة ما بعد المعالجة هي التقاط البيانات واقتصاصها، ثم استخدام مكتبة اكتشاف الحواف في MATLAB للكشف عن محيط الرمال في الحاوية التي يُنظر إليها على أنها أشكال أرضية. في الخطوة الأخيرة، حدد الحافة ذات الارتفاع الأقل لتكون الحافة الأرضية. يمكن اكتشاف الشكل السطحي للرمل باستخدام هذه الطريقة، كما هو موضح في الشكل 6. في بعض الأحيان، عندما يلتصق الرمل بورقة أكريليك شفافة، يجب تقليم الحواف يدويًا.
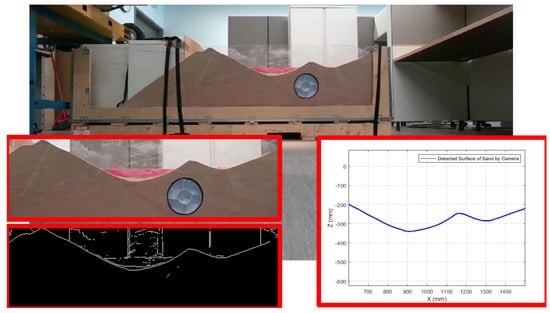
الشكل 6. استخدم كاميرا RGB وبرنامج MATLAB R2021a للكشف عن شكل الأرض
2. إنشاء المسار وطرق التحكم في التتبع
2.1. جيل المسار
بالإضافة إلى استخدام المحركات المتوازية لتوفير المزيد من الطاقة عن طريق تقليل حمل المحرك، تدرس هذه الدراسة أيضًا إنشاء المسار الأمثل لتقليل استهلاك الطاقة للحفارات المستقلة. ولتحقيق هذه الغاية، يعتبر دلو الحفار روبوتًا متحركًا يمكنه التحرك في بعدين والدوران حول محور واحد. يتم التحكم في درجات الحرية الثلاثة هذه بواسطة مشغلات خطية لذراع الرافعة والذراع والدلو.
يمكن للمستخدم تحديد العوائق مسبقًا أو اكتشافها باستخدام أي طريقة كشف في الوقت الفعلي. تتوفر طرق مختلفة للكشف عن وجود وموقع الأجسام تحت الأرض. من بينها، حاز رادار اختراق الأرض (GPR) والتصوير المقطعي للمقاومة الكهربائية (ERT) على قبول واسع النطاق. ومع ذلك، فإن هذه التقنيات مكلفة وتستغرق وقتا طويلا للتنفيذ والتشغيل. استخدمت دراسة أخرى أجهزة استشعار مغناطيسية فعالة من حيث التكلفة مثبتة في دلو الحفار لاكتشاف وتحديد موقع الأنابيب المعدنية والأسلاك الحية بناءً على المجالات المغناطيسية. مثل الروبوت المتنقل، يتحرك دلو الحفار على طول مسار محدد مع تجنب العوائق. ولكن من أجل خلق مسارات مناسبة لتقليل استهلاك الطاقة، تم دمج الحفاظ على الطاقة في عناصر أخرى.
2.2 إنشاء المسار على أساس PSO
تحسين سرب الجسيمات (PSO) هو أسلوب حسابي مستوحى من السلوك الجماعي للحيوانات مثل الطيور والأسماك. إنه يحل مشاكل التحسين عن طريق ضبط موضع وسرعة الجسيمات بشكل متكرر في مساحة البحث. تهدف PSO إلى إيجاد الحلول المثلى من خلال الموازنة بين الاستكشاف والاستغلال.
تستخدم هذه الدراسة خوارزمية PSO لإنشاء مسارات مثالية تهدف إلى تقليل استهلاك الطاقة أثناء الحفر مع تجنب العوائق تحت الأرض. وتتمثل الأهداف الرئيسية في تقليل استهلاك الطاقة، وتقليل انحراف شكل أرض الحفر عن الملامح المطلوبة وزيادة المسافة إلى الأجسام الموجودة تحت الأرض.
تظهر نتائج محاكاة MATLAB أن عملية التحسين المعتمدة على PSO الموفرة للطاقة (الشكل 7) يمكن أن تقلل من استهلاك الطاقة بنسبة 18.5٪ (الشكل 8) مقارنة بنفس العملية دون توفير الطاقة مع محاولة تجنب العوائق تحت الأرض وتحقيق أقرب مسار شكل الارض المرغوب .
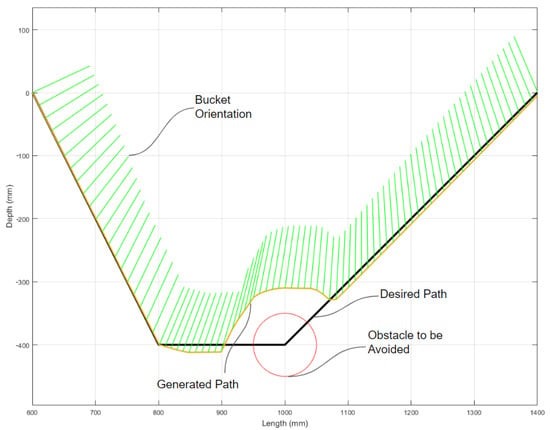
الشكل 7. محاكاة توليد المسار مع الأخذ في الاعتبار توفير الطاقة
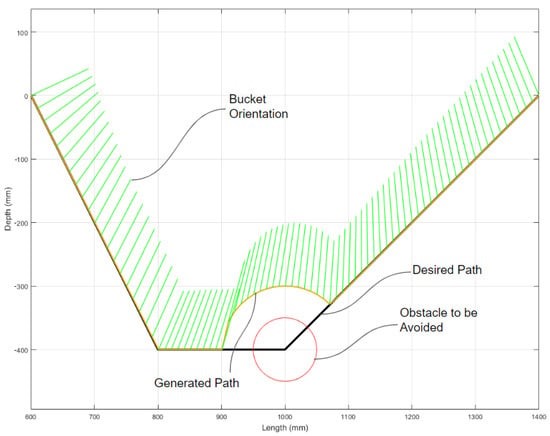
الشكل 8: محاكاة توليد المسار دون مراعاة توفير الطاقة
2.3 إنشاء المسار القائم على PFM
في خوارزمية PFM، يتم تمثيل البيئة كمجال محتمل ويحاول الروبوت الوصول إلى الهدف بأقل قدر ممكن من الطاقة الكامنة. لذلك، في كل تكرار، يتحرك الروبوت إلى المواضع المجاورة بأقل طاقة محتملة، ويجد في النهاية أفضل طريق إلى الهدف من خلال اجتياز هذه المواضع.
في تخطيط المسار المعتمد على PFM، يحاول الروبوت الوصول إلى الهدف الذي يسحبه. أظهرت التجارب عكس ذلك تمامًا: فالأشياء التي حاول الروبوت الابتعاد عنها دفعته بعيدًا. قد يختلف حجم متجه الدفع للأجسام المذكورة أعلاه اعتمادًا على حجم الكائن. أخيرًا، يختار الروبوت اتجاهه عن طريق إضافة هذين المتجهين (متجه القوة الناتج عن نقطة الهدف والجسم) ويختار سرعته بناءً على حجم المتجه المجمع.
ولتحقيق حركة موفرة للطاقة، قمنا ببناء جسم اصطناعي يسحب الروبوت في اتجاه أقل استهلاكًا للطاقة. في هذه الدراسة، يسمى هذا الكائن الاصطناعي الكائن E. ومع ذلك، يجب وضع هذا الكائن E في منطقة لا يؤدي فيها تحريك الروبوت نحوه إلى زيادة المسافة بين الروبوت ونقطة الهدف (الشكل 9). من عدة مواقع حول الروبوت، سيتم تحديد الموقع الذي يتطلب أقل طاقة للوصول إليه باعتباره الكائن E.
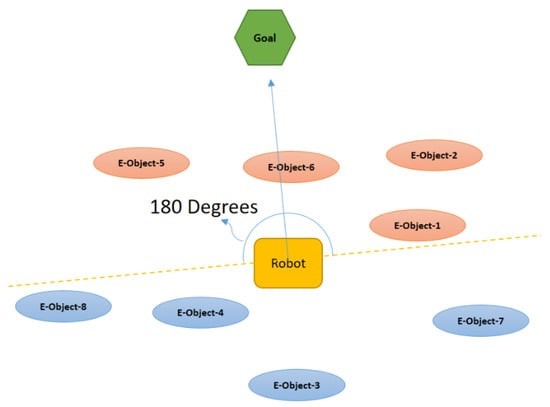
الشكل 9. النقاط المرشحة لإنشاء كائنات إلكترونية تقلل من استهلاك الطاقة
يوضح الشكل 9 كيفية تحديد الكائنات E التي لا تزيد المسافة بين الروبوت ونقطة الهدف. ومن أجل الوصول إلى هذه الكائنات E (الممثلة بالأشكال البيضاوية البرتقالية في الشكل 9)، لا يحتاج الروبوت إلى التحرك بعيدًا عن نقطة الهدف. في الشكل 9 والشكل 10، افترض أن الجسم E 2 يستهلك أقل طاقة بين العناصر البرتقالية المرشحة.
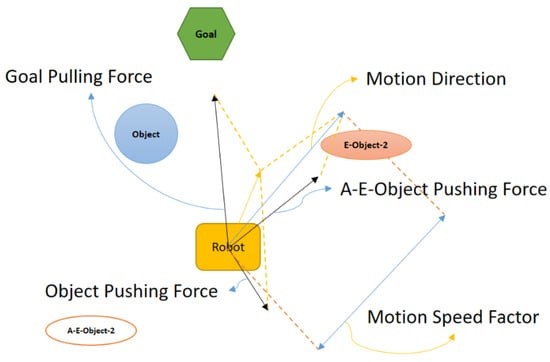
الشكل 10. PFM مع ميزات توفير الطاقة
من أجل الالتزام بالفكرة الأساسية PFM التي تدفع العوائق الروبوت، تم إنشاء جسم طاقة اصطناعي (AE-Object-2) على الجانب الآخر من الروبوت على نفس المسافة (الشكل 10). ستقوم خوارزمية PFM بعد ذلك بتحديد اتجاه وحجم سرعة الروبوت، مع الأخذ في الاعتبار عوائق الطاقة الحقيقية والاصطناعية وكذلك النقاط المستهدفة.
تكون آليات المالية العامة بشكل عام أقل قدرة على التكيف مع الظروف الديناميكية من عمليات دعم السياسات. في حين أن منظمات دعم المحيطات يمكنها التكيف مع الظروف المتغيرة من خلال قدرات الاستكشاف والاستغلال لأسراب الجسيمات، فإن أنظمة PFMs تتطلب عادةً نماذج ثابتة للتنقل بفعالية.
2.4 التحكم في تتبع المسار
إن اتباع المسار لا يقل أهمية عن إنشاء المسار. وذلك لأنه يجب تتبع المسار الذي تم إنشاؤه بدقة لتحقيق الحركة المطلوبة، واستهلاك أقل قدر من الطاقة وتقليل الانحراف بين المسار المتتبع والمسار الذي تم إنشاؤه.
تقترح هذه الدراسة تصميمًا جديدًا لتصنيع حفار كهربائي مستقل يستخدم مشغلين متوازيين لتوزيع الحمل وتخفيف الضغط على كل مشغل. تم تصميم الحفارات الكهربائية لبذل المزيد من القوة على الأرض مع استهلاك طاقة أقل. تم اختبار طريقة توليد المسار المقترحة باستخدام خوارزميات PSO و PFM باستخدام حفارة مصنعة. بالنسبة لهذا الاختبار، تم فحص ومقارنة خمسة سيناريوهات مختلفة بناءً على نوع مولد المسار ونوع وحدة التحكم وحالة وضع توفير الطاقة.
بالنسبة للعمل المستقبلي، هناك العديد من الأساليب الممكنة التي يمكن تطبيقها لمعالجة نفس الموضوع. على سبيل المثال، يمكن استخدام الرسم البياني للحقل المتجه (VFH) لتحديد اتجاهات التنقل المحتملة، وتجنب العوائق والتوجه نحو الهدف بناءً على رسم بياني قطبي للبيئة التي تم إنشاؤها. كما هو مذكور في المقدمة، قد يكون ACO (Ant Colony Optimization) أيضًا مرشحًا قيمًا. علاوة على ذلك، تم اختبار الخوارزمية المطورة فقط في التنقيب عن الرمال في بيئة داخلية. ينبع هذا القيد من تصميمات الحفارات الحالية، التي تفتقر إلى القدرة على المناورة والعزل المائي. ولذلك، يجب دمج عجلات القيادة والأغطية المقاومة للماء في تصميم الحفار من أجل النشر في المستقبل. وهذا الاعتبار سيجعل من الممكن إجراء تجارب في البيئات الخارجية باستخدام مجموعة متنوعة من المواد مثل الطمي والطين والحصى. بالإضافة إلى ذلك، استخدمت هذه الدراسة كاميرا تم وضعها بعيدًا عن اللوحة الشفافة لصندوق الرمل لمراقبة محيط الأرض، ولكن هذا غير عملي في بيئة خارجية. ولذلك، هناك حاجة إلى مستشعر إضافي، مثل الليدار، لمعالجة هذه المشكلة وقياس شكل الأرض بدقة.
المصدر: قسم هندسة السيارات والميكاترونكس، معهد أونتاريو للتكنولوجيا، أوشاوا.

من فضلك تابع القراءة، ابق على اطلاع، اشترك، ونحن نرحب بك لتخبرنا برأيك.
Add: Pudang Village, Xiamei Town, Nan'An City, Quanzhou, Fujian, China




Quanzhou Huamao Machinery Equipment Co.,Ltd جميع الحقوق محفوظة
.  الشبكة المدعومة
خريطة الموقع
| المدونة
| Xml | سياسة الخصوصية
الشبكة المدعومة
خريطة الموقع
| المدونة
| Xml | سياسة الخصوصية


